Negatif Armür
- Ayrıntılar
- Üst Kategori: ROOT
- Kategori: Dokuma
- Çarşamba, 31 Temmuz 2019 10:42 tarihinde oluşturuldu
- Son Güncelleme: Cumartesi, 05 Şubat 2022 22:15
- Çarşamba, 31 Temmuz 2019 10:42 tarihinde yayınlandı.
- Gösterim: 5554
 Derstekstil
Derstekstil
NEGATİF ARMÜR
Negatif armürler daha basit oldukları için pozitif armürlere oranla daha çok kullanım alanı bulmuşlardır ve daha ziyade hafif ve orta çözgü gerilimleri için uygundurlar. Bu sistemlerin en büyük başarısı armürün bir devrinin iki atkı atımına karşılık gelmesi, dolayısıyla hareketlerin pek çoğunun yarım tezgâh hızında gerçekleştirilebilmesidir. Bu sayede daha yüksek hızlarda çalışma imkânı oluşmaktadır. Staubli firmasının ürettiği mekanik kontrollü çift stroklu açık ağızlık oluşturan bir negatif armürün şematik görünüşü aşağıda görülmektedir.
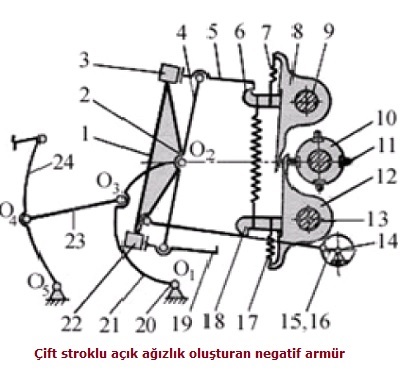
Armürün 14 numaralı tahrik mili dönme hareketini dokuma tezgahının ana milinden alır. Milin üzerindeki 15 eksantriği 16 numaralı kol ile l numaralı iki omuzlu kola bağlanmış olup üst ve alt uzuvlar 3 ve 22 numaralı mesnetlerle bağlanmış durumdadır. O1 noktasına hareketli olarak yerleştirilmiş 21 numaralı kol, O2 noktasından bağlanmış 4 numaralı balans bu nokta boyunca salınım hareketi yapabilir ve iki ucunda 4 ve 19 numaralı kancaları taşır. Balansın dönme merkezi, balans sol kenar duruma geldiğinde 1 numaralı kolun salınım merkezi ile çakışır. Bu durumda 5 veya 19 numaralı kancalardan hiçbiri 6 veya 18 numaralı idare kancaları ile bağlantıya girmemişse, 4 balansı boş hareket yapmış olur ve çerçeve alt konumda bulunur. 5 ve 19 kancalarından biri ile ilişkiye girdiği durumda ona bağlı çerçeve üst duruma gelir ve atkı atıldıktan hemen sonra geri hareket yaparak alt duruma getirilir.
Çerçevelerin alt duruma getirilmesi yayların yardımı ile gerçekleştirilir. 5 ve 19 numaralı kancaların her ikisi aynı zamanda 6 ve 8 numaralı idare edici kancalar ile bağlantıya girdiği durumda çerçevelerin üst konumda beklemesi söz konusudur.
İdare edici 6 ve 18 kancaları 9 ve l3 eksenlerinde hareketli olarak yerleşmiş iki omuzlu 8 ve 12 numaralı uzuvlara 7 ve 17 yayları ile bağlı durumdadırlar. Desen zincirine takılmış 11 baklaları 8 ve 12 numaralı iki omuzlu uzuvların programa göre idare edilmesini gerçekleştirir. 21 kolun çerçevelere hareket 23 ve 24 numaralı uzuvlardan iletilir.
Negatif armürler günümüzde mekanik ve elektronik olarak üretilmektedirler.
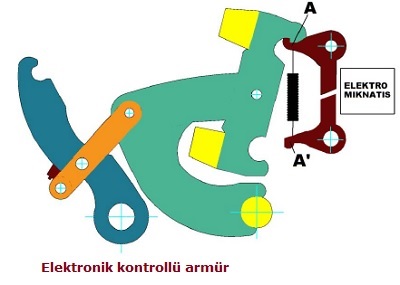
Aşağıdaki şekillerde Staubli firmasına ait 2521model mekanik ve 2571 model elektronik kontrollü negatif armürlerin şematik çizimleri verilmektedir.
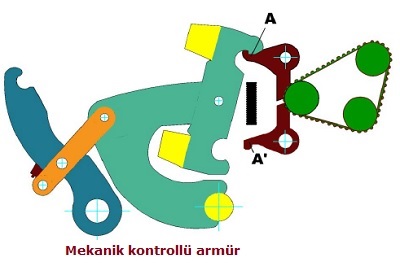
Şekildeki Staubli firmasına ait negatif armürlerin mekanik (model 2521) ve elektronik (model 2571) program taşıyıcıları ara elemanların üzerinden A ve A’ ile gösterilen tespit kancalarını kumanda etmektedirler.
Kaldırma üniteleri, balanslar ve hareketli kancalardan oluşmaktadır. Hareket kolları tespit kancalarının hareketli bir kancayı yakalaması ile devreye girmektedirler.
Elektronik kontrollü armürde A ve A’ ile gösterilen tespit kancalarının kontrolü elektromıknatıs sayesinde yapılmaktadır. Staubli’ ye ait bu tasarımlar, azami çalışma güvenliği ile an az sayıda döner mafsal ve optimal çerçeve hareketini garanti etmektedirler.
Muratec firması negatif armür üreten diğer bir firma olup armürlerin seçme ünitesinde elektromıknatıslar yerine elektronik olarak kontrol edilen pnömatik pistonlar kullanmaktadır.
Aşağıdaki şekilde elektronik kontrollü pnömatik seçme mekanizmalı Muratec negatif armürünü gösterilmektedir.
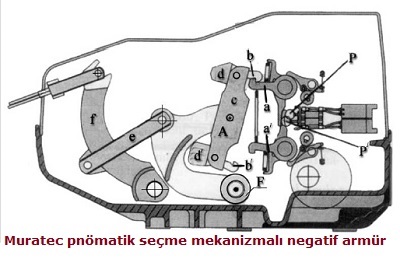
Yukarıdaki şekilde görüldüğü gibi bir tahrik mekanizması tarafından c kolunun üst ve alt uçlarında bulunan kancaları (b ve b') tutması sağlanır. Böylece çerçevelerin yukarı konuma hareket ettirilmesi gerçekleştirilir. Pistonların ileri-geri hareket ettirilmesi elektronik olarak kontrol edilmektedir. Çerçeve alt konumdan üst konuma kaldırılacaksa önce ileri konumdaki kanca, karşısındaki kanca tarafından pistonun ileri hareketi ile tutulur. Daha sonra c kolunun salınım hareketi ile A noktası AF yarıçaplı daire yayı üzerinde saat ibresi yönünde bir miktar döner. A noktasının bu hareketi e kolu aracılığı ile f kolunun salınım hareketine dönüştürülür F kolunun salınım hareketi eğilebilir kablolarla çerçevelere iletilir. Çerçeve kalkış miktarı artırmak istenildiğinde e kolunun f koluna bağlantı noktası yukarıya kaydırılır.

